Hi,
In my simulation a disk is rotating around its own axis while translating and where a small part of the disk is submerged within a bed of material.
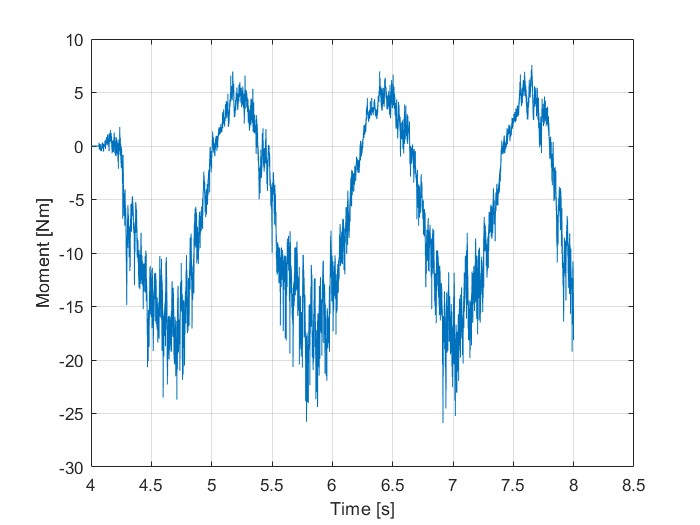
For my research I need the torque output on the rotation axis. However, when outputting the torque on my rotating disk in a .csv file, I get a sinusoidal torque for each component X,Y,Z, (see picture 1) which is not what I would have expected beforehand. Especially because it moves through 0 meaning my particles give the disk a 'push' at some points in time. Some directions:
- The period of the sinus is equal to the rotational period
- All forces in X,Y,Z direction are all constant
I thought perhaps it is due to the force directions flipping as the center(s) of mass move over the blade, but this effect is not enough to cause such a large amplitude in torque. (see picture 2)
I also checked with a simple pin on disk simulation whether it was due to the coordinate system, but these output a constant torque meaning LIGGGHTS uses the global coordinate system to determine the torque. I have not been able to replicate my behaviour this way. And another point, rotating my disk STL when initializing also has an effect on the measurements (phase and amplitude) meaning it also uses some kind of local coordinate system?
Does anyone have an idea how LIGGGHTS determines this torque output and perhaps how I could 'fix' it so I get a constant torque?
| Attachment | Size |
|---|---|
| 55.44 KB |
{kind=link}
kees_bulk | Mon, 07/18/2022 - 14:28
Fixed it
Never mind, I just found out there is a reference_point command which specifies around which coordinates it calculates the torque so I have already fixed it.